Opening the Black Box of 3D Reconstruction Error Analysis with VECTOR
Abstract
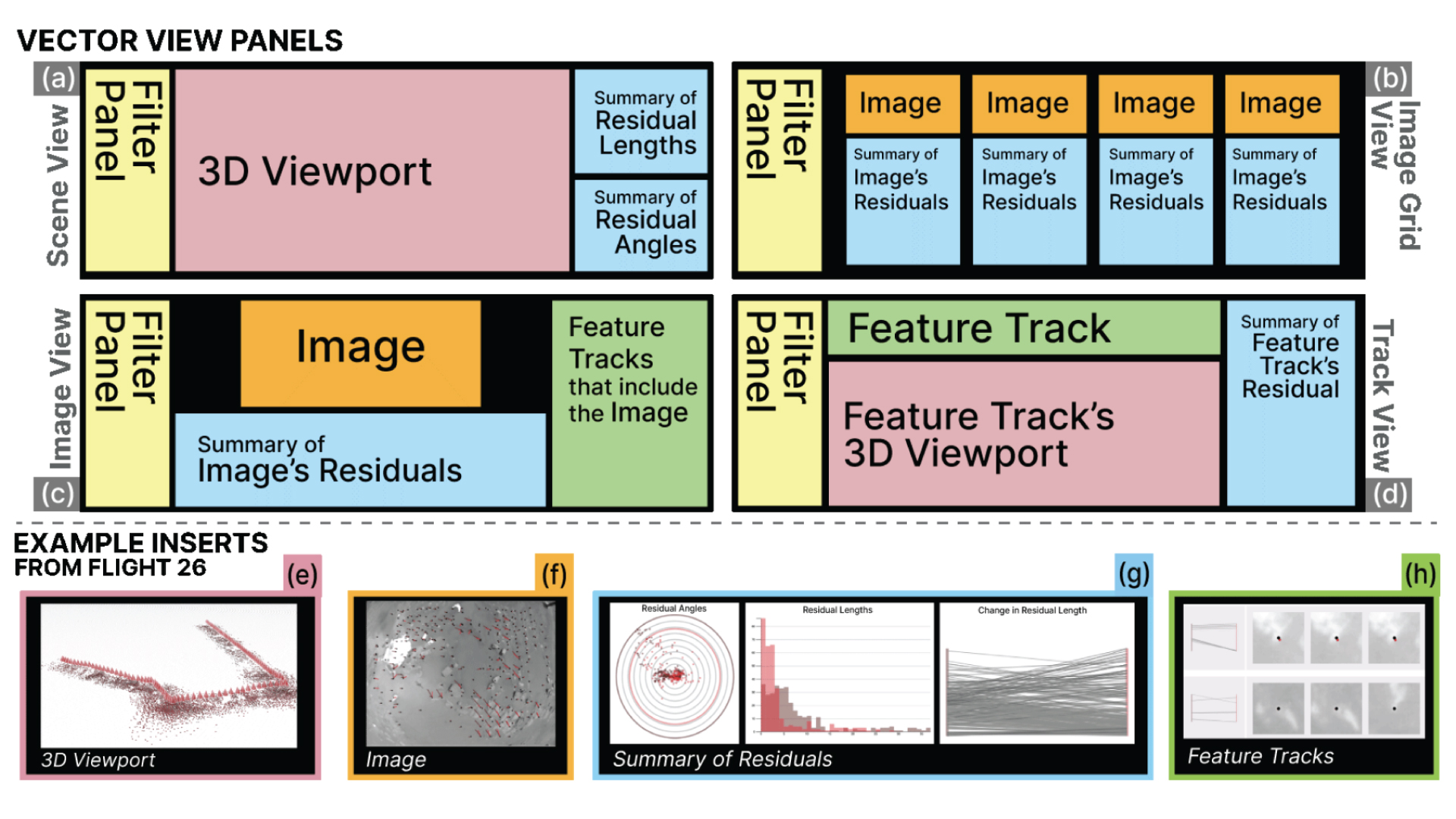
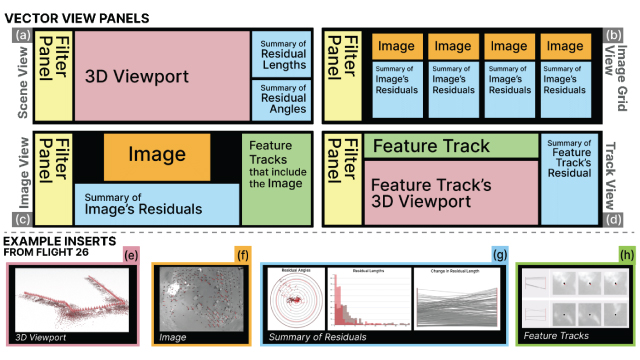
Reconstruction of 3D scenes from 2D images is a technical challenge that impacts domains from Earth and planetary sciences and space exploration to augmented and virtual reality. Typically, reconstruction algorithms first identify common features across images and then minimize reconstruction errors after estimating the shape of the terrain. This bundle adjustment (BA) step optimizes around a single, simplifying scalar value that obfuscates many possible causes of reconstruction errors (e.g., initial estimate of the position and orientation of the camera, lighting conditions, ease of feature detection in the terrain). Reconstruction errors can lead to inaccurate scientific inferences or endanger a spacecraft exploring a remote environment. To address this challenge, we present VECTOR, a visual analysis tool that improves error inspection for stereo reconstruction BA. VECTOR provides analysts with previously unavailable visibility into feature locations, camera pose, and computed 3D points. VECTOR was developed in partnership with the Perseverance Mars Rover and Ingenuity Mars Helicopter terrain reconstruction team at the NASA Jet Propulsion Laboratory. We report on how this tool was used to debug and improve terrain reconstruction for the Mars 2020 mission.
Authors

Kazi Jawad
Isabel Li
Francois Ayoub
Robert G. Deen
Scott Davidoff
Dominik Moritz
Mauricio Hess-Flores
Citation
Opening the Black Box of 3D Reconstruction Error Analysis with VECTOR
Racquel Fygenson, Kazi Jawad, Isabel Li, Francois Ayoub, Robert G. Deen, Scott Davidoff, Dominik Moritz, and Mauricio Hess-Flores. IEEE Transactions on Visualization and Computer Graphics—VIS/TVCG. 2024. DOI: 10.1109/VIS55277.2024.00065
Khoury Vis Lab — Northeastern University
* West Village H, Room 302, 440 Huntington Ave, Boston, MA 02115, USA
* 100 Fore Street, Portland, ME 04101, USA
* Carnegie Hall, 201, 5000 MacArthur Blvd, Oakland, CA 94613, USA